




品牌: SIEMENS/西门子
西门子(SIEMENS)的PLC产品包括LOGO、S7-200、S7-1200、S7-300、S7-400、S7-1500等。 西门子S7系列PLC体积小、速度快、标准化,具有网络通信能力,功能更强,可靠性高。S7系列PLC产品可分为微型PLC(如S7-200),小规模性能要求的PLC(如S7-300)和中、高性能要求的PLC(如S7-400)等
常问问题如何判断 S7-200 CPU 已经发送出脉冲?![]()
可通过以下硬件输出点和软件中指令监视两种方法判断 S7-200 CPU 正在输出脉冲:
方法 1. 观察 S7-200 CPU 脉冲输出点 Q0.0 或 Q0.1 指示灯的状态:
当低频率脉冲输出时,Q0.0 或 Q0.1 的指示灯为闪烁状态。
方法 2. 在 STEP 7 Micro/Win 编程软件中在线监视 Q0_0_CTRL 或 Q0_1_CTRL 指令输出参数 C_Pos 数值:
S7-200 CPU Q0.0 脉冲输出, Q0.2 方向控制点状态为 0 时,C_Pos 数值不断减小;S7-200 CPU Q0.0 脉冲输出, Q0.2 方向控制点状态为 1 时,C_Pos 数值不断增加。
S7-200 CPU Q0.1 脉冲输出, Q0.3 方向控制点状态为 0 时,C_Pos 数值不断减小;S7-200 CPU Q0.1 脉冲输出, Q0.3 方向控制点状态为 1 时,C_Pos 数值不断增加。
以 Q0_0_CTRL 为例,如下图 4 所示:

图 4. 监视 C_Pos 数值变化
![]() 在 MAP 库指令中如何知道 S7-200 CPU 输出脉冲的频率?
在 MAP 库指令中如何知道 S7-200 CPU 输出脉冲的频率?
可以通过以下两种方法监视到 S7-200 CPU 输出脉冲的频率:
1. MAP 库预先定义了 SMD172 和 SMD 182 分别为Q0.0 和 Q0.1 的脉冲频率值 ,在该特殊存储器地址中可以监视到 S7-200 CPU 输出脉冲的频率。
2. MAP 库预先定义了高速计数器 HC0 和 HC3,可以利用测量高速频率串的频率和速度库指令来计算 S7-200 CPU 输出脉冲的频率。
![]() 以 Q0_0_Stop 指令为例, 使用该指令能否实现S7-200 CPU 立即停止脉冲输出?
以 Q0_0_Stop 指令为例, 使用该指令能否实现S7-200 CPU 立即停止脉冲输出?
不能。触发 Q0_0_Stop 指令只能实现减速停止脉冲输出。
![]() 使用 MAP 库指令如何实现急停开关按下时,立即停止?
使用 MAP 库指令如何实现急停开关按下时,立即停止?
以 Q0_0_CTRL 为例,当该指令的正向极限或反向极限信号为 1 时,S7-200 CPU立即停止脉冲输出。
因此可将急停开关信号接入正向极限或反向极限信号来实现立即停止脉冲输出。编程方法可参考如下图 5 所示:

图 5. 急停编程
![]() 使用 MAP 库指令是否可以在 S7-200 CPU 脉冲输出时修改频率?
使用 MAP 库指令是否可以在 S7-200 CPU 脉冲输出时修改频率?
以轴 0 为例, Q0_0_MoveRelative,Q0_0_MoveAbsolute 不能在 S7-200 CPU 脉冲输出时修改频率;
使用 Q0_0_MoveVelocity 指令,需要先赋予新的频率值,重新使用上升沿信号触发 Q0_0_MoveVelocity 指令执行位, S7-200 CPU 即可按照修改后的新频率值运行。
如下图 6 所示:
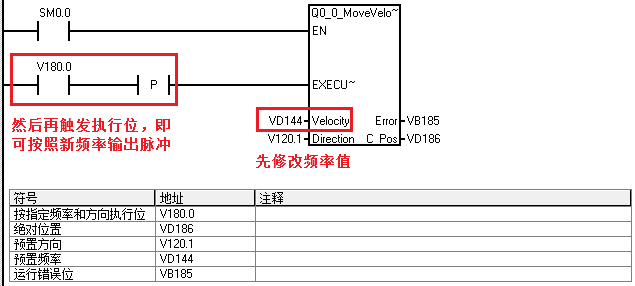
图 6. Q0_0_MoveVelocity 指令修改脉冲输出频率
![]() 使用 MAP 库指令回零点,回零点的速度是否可以修改?
使用 MAP 库指令回零点,回零点的速度是否可以修改?
可以。以轴 0 为例,回零点高速 Homing_Fast_Spd 默认为 Q0_0_CTRL 指令中输入参数大频率Velocity_Max/2 ;回零点低速 Homing_Slow_Spd 默认为 Q0_0_CTRL 指令中输入参数启动停止频率 Velocity_SS。
可按照如下步骤修改回零点的速度:
一步. 如库存储区建议地址为VB0至VB67, 如下图 7 所示:

图 7. 库存储区建议地址
第二步. 在符号表 MAP SERV Q0.0(V1.8)找到回零点高速 Homing_Fast_Spd 和回零点低速 Homing_Slow_Spd 对应的地址。Homing_Fast_Spd 存放地址为VD23,Homing_Slow_Spd 存放地址为VD19,如下图 8 所示:
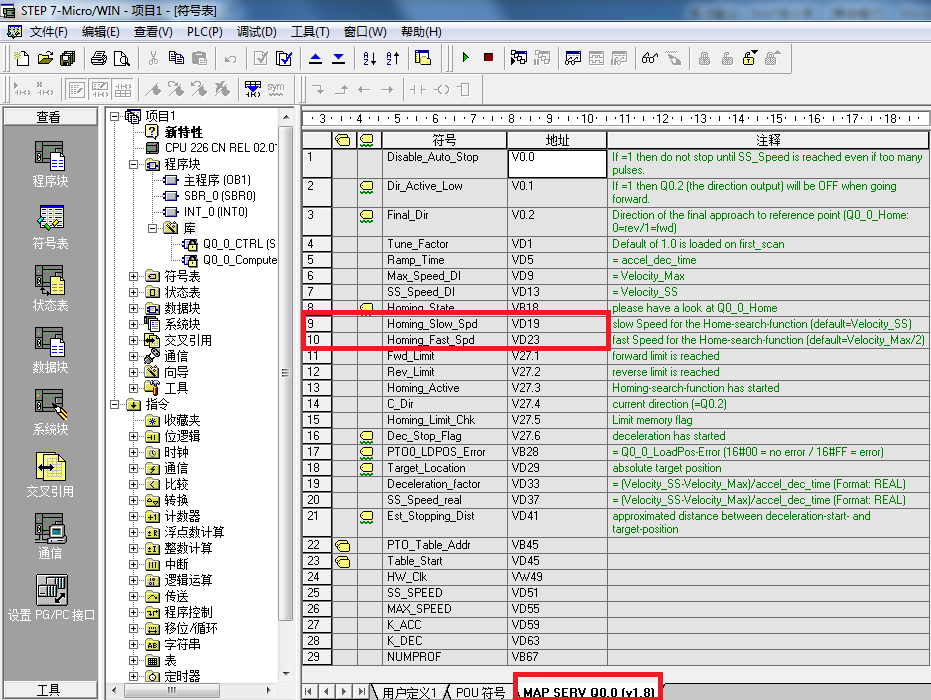
图 8. 查找回零点速度地址
第三步. 在执行回零点运动前,将修改的回零点高速 Homing_Fast_Spd 和回零点低速 Homing_Slow_Spd 新值通过 MOVE 传送指令传送到 VD23 和 VD19。 如下图 9 所示:

图 9. 修改回零点速度
![]() 注意:一旦 Q0_X_CTRL 指令中输入参数大频率 Velocity_Max 或启动停止频率 Velocity_SS 速度改变,回零点高速 Homing_Fast_Spd 和回零点低速 Homing_Slow_Spd 又自动按照默认值计算出。
注意:一旦 Q0_X_CTRL 指令中输入参数大频率 Velocity_Max 或启动停止频率 Velocity_SS 速度改变,回零点高速 Homing_Fast_Spd 和回零点低速 Homing_Slow_Spd 又自动按照默认值计算出。